Digital Ruler¶
Giriş¶
Projemizde PicoBricks ile ultrasonik sensör kullanarak mesafe değerini butona basıldığında OLED ekranda göstereceğimiz dijital bir cetvel hazırlayacağız.
Projenin Detayları ve Algoritması¶
Uzunluk ölçmek için birçok araç kullanılmaktadır. Bu araçların başında cetveller gelmektedir. Ölçeceğimiz yere ve büyüklüğüne göre ölçü aletimiz farklılaşmaktadır. İnşaat ve mimaride şerit metreler , küçük ve milimetrik hassasiyet gerektiren nesneler için kumpaslar kullanılmaktadır. Ayrıca hem büyük hem de hassas ölçüm yapılması gereken bir alan ölçülmek isteniyorsa lazer ve kızılötesi sistemler ile çalışan mesafe ölçerler kullanılmaktadır. Sağlık sektöründe kullanılan ultrasonografi cihazları da benzer mantıkla çalışmakta ancak ölçümlerini görsellere dönüştürmektedir. Ultrasonik sensörler yaydıkları ses dalgalarının geri dönüş sürelerine göre mesafe tespiti yaparlar.
Bağlantı Diyagramı¶
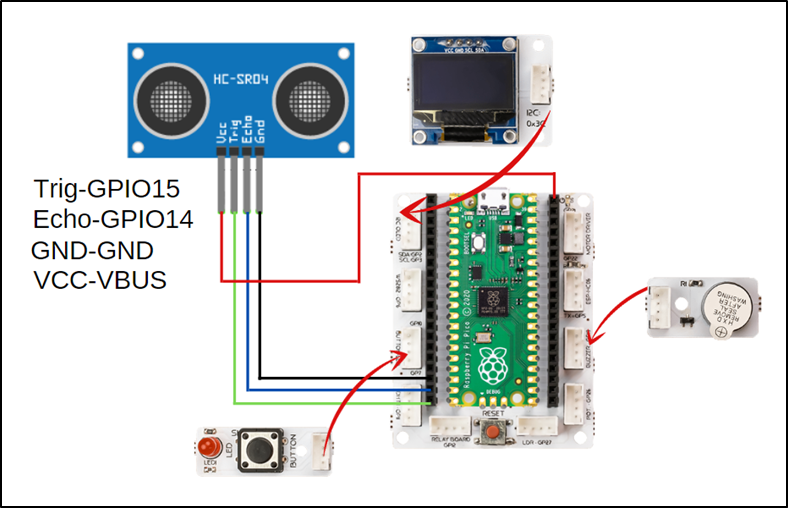
Picobricks modüllerini herhangi bir kablo bağlantısı olmadan programlayabilir ve çalıştırabilirsiniz. Modülleri karttan ayırarak kullanacaksanız modül bağlantılarını verilen konektör kablolar ile yapmalısınız.
Projenin MicroPython Kodu¶
from machine import Pin, PWM, I2C
from utime import sleep
from picobricks import SSD1306_I2C
import utime
#define the libraries
redLed=Pin(7,Pin.OUT)
button=Pin(10,Pin.IN,Pin.PULL_DOWN)
buzzer=PWM(Pin(20,Pin.OUT))
buzzer.freq(392)
trigger = Pin(15, Pin.OUT)
echo = Pin(14, Pin.IN)
#define input and output pins
WIDTH = 128
HEIGHT = 64
#OLED screen settings
sda=machine.Pin(4)
scl=machine.Pin(5)
i2c=machine.I2C(0,sda=sda, scl=scl, freq=1000000)
#initialize digital pin 4 and 5 as an OUTPUT for OLED communication
oled = SSD1306_I2C(128, 64, i2c)
measure=0
finalDistance=0
def getDistance():
trigger.low()
utime.sleep_us(2)
trigger.high()
utime.sleep_us(5)
trigger.low()
while echo.value() == 0:
signaloff = utime.ticks_us()
while echo.value() == 1:
signalon = utime.ticks_us()
timepassed = signalon - signaloff
distance = (timepassed * 0.0343) / 2
return distance
#calculate the distance
def getMeasure(pin):
global measure
global finalDistance
redLed.value(1)
for i in range(20):
measure += getDistance()
sleep(0.05)
redLed.value(0)
finalDistance = (measure/20) + 1
oled.fill(0)
oled.show()
oled.text(">Digital Ruller<", 2,5)
oled.text("Distance " + str(round(finalDistance)) +" cm", 0, 32)
oled.show()
#print the specified distance to the specified x and y coordinates on the OLED screen
print(finalDistance)
buzzer.duty_u16(4000)
sleep(0.05)
buzzer.duty_u16(0)
measure=0
finalDistance=0
#sound the buzzer
button.irq(trigger=machine.Pin.IRQ_RISING, handler=getMeasure)
Tüyo
Eğer kodunuzun adını main.py olarak kaydederseniz, kodunuz her BOOT yaptığınızda çalışacaktır.
Projenin Arduino C Kodu¶
#include <Wire.h>
#include "ACROBOTIC_SSD1306.h"
#include <NewPing.h>
// define the libraries
#define TRIGGER_PIN 15
#define ECHO_PIN 14
#define MAX_DISTANCE 400
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE);
#define T_B 493
int distance = 0;
int total = 0;
void setup() {
pinMode(7,OUTPUT);
pinMode(20,OUTPUT);
pinMode(10,INPUT);
// define input and output pins
Wire.begin();
oled.init();
oled.clearDisplay();
}
void loop() {
delay(50);
if(digitalRead(10) == 1){
int measure=0;
digitalWrite(7,HIGH);
tone(20,T_B);
delay(500);
noTone(20);
for (int i=0;i<20;i++){
measure=sonar.ping_cm();
total=total+measure;
delay(50);
}
distance = total/20+6; // calculate the distance
digitalWrite(7,LOW);
delay(1000);
oled.clearDisplay();
oled.setTextXY(2,1);
oled.putString(">Digital Ruler<");
oled.setTextXY(5,1);
oled.putString("Distance: ");
oled.setTextXY(5,10);
String string_distance=String(distance);
oled.putString(string_distance);
oled.setTextXY(5,12);
oled.putString("cm"); // print the calculated distance on the OLED screen
measure=0;
distance=0;
total=0;
}
}
Projenin MicroBlocks Kodu¶
|

Not
MicroBlocks ile kodlama yapmak için yukarıdaki görseli MicroBlocks Run sekmesine sürükleyip bırakmanız yeterlidir.